18. Experiments with norms#
We numerically compute the coefficients \(c_1, c_2 \in {\mathbb R}^+\) of equivalent norms
We assume that both norms are generated by inner products, i.e. \(\| u \|_A^2 = A(u,u)\) and \(\| u \|_B^2 = B(u,u)\).
To perform computations we need finite dimensional spaces. For function spaces \(V\), we choose finite element sub-spaces of mesh-size \(h\) and polynomial order \(p\). We compute on a sequence of spaces \(V_{h,p}\), to obtain \(c_1(h,p)\) and \(c_2(h,p)\). If these functions \(c_1\) and \(c_2\) seem to be bounded uniformly in \(h\) and \(p\), there is hope that the norm equivalence holds true also on the Sobolev space \(V\). This does NOT replace a mathematical analysis, but may help to decide if it is worth spending time to prove the estimate, or better search for a counter example.
By means of a basis for \(V_h\), we can rewrite the norm equivalence in \({\mathbb R}^N\) with \(N = \operatorname{dim} \, V_h\)
with representation matrices \(A\) and \(B\), or also with lower and upper bounds for the Rayleigh quotient
Stationary points of the Rayleigh quotient are eigenvectors of the generalized eigenvalue-problem: find \(\lambda \in {\mathbb R}\) and \(u \in {\mathbb R}^N\) such that
The eigenvalues \(\lambda\) are the values of the quotient. In particular, the smallest and largest eigenvalues give sharp bounds for \(c_1\) and \(c_2\).
NGSolve provides the solver LOBPCG to compute a small number \(m\) of eigenpairs corresponding to the smallest \(m\), or largest \(m\) eigenvalues. Both matrices must by symmetric, and \(B\) must be also positive definite.
Note: The option for the largest eigenvalues was added 2024-03-16 (can use pip install --upgrade --pre ngsolve). For prior versions you have to swap the matrices \(A\) and \(B\), search for the smallest eigenvalue, and replace \(\lambda\) by \(1/\lambda\).
from ngsolve import *
from netgen.occ import *
from ngsolve.webgui import Draw
import matplotlib.pyplot as plt
18.1. Friedrichs’ inequality#
We want to find a sharp constant \(c_F\) in Friedrich’s inequality $\( \| u \|_{L_2} \leq c_F \| \nabla u \|_{L_2} \quad \forall \, v \in H_{0,D}^1(\Omega), \)\( with \)\Omega = (0,1)^2$, and Dirichlet on the left and on the right side of the domain.
def SetupProblem(h,p):
mesh = Mesh(unit_square.GenerateMesh(maxh=h))
fes = H1(mesh, order=p, dirichlet="left|right")
u,v = fes.TnT()
L2Norm = BilinearForm(u*v*dx).Assemble().mat
H1SemiNorm = BilinearForm(grad(u)*grad(v)*dx).Assemble().mat
pre = Projector(fes.FreeDofs(), range=True)
return L2Norm, H1SemiNorm, pre, fes
A,B,P,fes = SetupProblem(0.1, 5)
evals,evecs = solvers.LOBPCG(A, B, pre=P, num=5, maxit=200, largest=True, printrates=False)
print ("eigenvalues: ", list(evals))
print ("Friedrichs' constant: c_F = ", sqrt(evals[-1]))
print ("inverse of Friedrichs' constant: 1/c_F = ", 1/sqrt(evals[-1]))
gfu = GridFunction(fes)
gfu.vec.data = evecs[-1]
gfu.vec.data /= Integrate(gfu*dx, fes.mesh) # normalize eigenfunction
eigenvalues: [0.020264207558575994, 0.020264233527779982, 0.02533028380233841, 0.050660572038881795, 0.10132057969557395]
Friedrichs' constant: c_F = 0.31830893750501876
inverse of Friedrichs' constant: 1/c_F = 3.141602016701881
Draw (gfu);
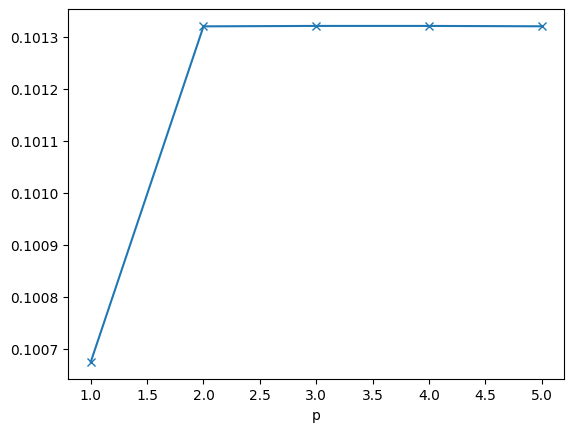
We compute on a sequence of spaces, and observe that the maximal eigenvalue converges very fast. This is in agreement to Friedrichs’ inequality which we have proven above.
lams = []
for p in range(1,6):
A,B,P,fes = SetupProblem(0.1, p)
evals,evecs = solvers.LOBPCG(A, B, pre=P, num=5, maxit=200, largest=True, printrates=False)
lams.append([p,evals[-1]])
print (lams)
plt.xlabel("p")
plt.plot(*zip(*lams), '-x');
[[1, 0.10067458643196478], [2, 0.10132036713021426], [3, 0.10132118314080268], [4, 0.10132117977940513], [5, 0.10132047723582767]]
18.1.1. Inverse estimates#
Now we search for the other bound for the norm equivalence, i.e.
where the (squared) sharp bound is the maximizer of the Rayleigh quotient
lams = []
for level in range(2,7):
h = 0.5**level
A,B,P,fes = SetupProblem(h, 1)
evals,evecs = solvers.LOBPCG(B, A, pre=P, num=5, maxit=200, printrates=False, largest=True)
lams.append([1/h,evals[-1]])
print (lams)
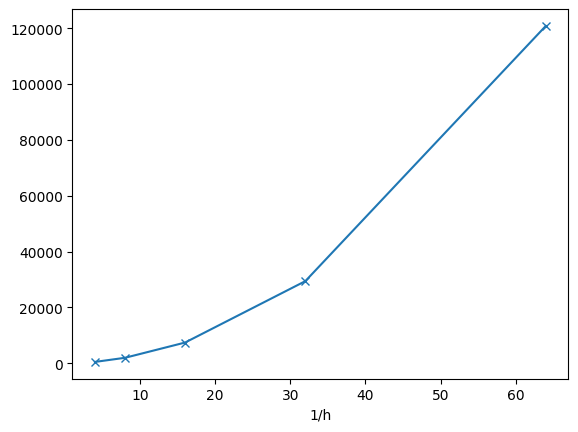
plt.xlabel("1/h")
plt.plot(*zip(*lams), '-x');
[[4.0, 467.86011230075974], [8.0, 1943.9188878907053], [16.0, 7407.675010711864], [32.0, 29399.59562741322], [64.0, 120814.44789492615]]
lammins = []
for p in range(1,6):
A,B,P,fes = SetupProblem(0.2, p)
evals,evecs = solvers.LOBPCG(B, A, pre=P, num=5, maxit=200, printrates=False, largest=True)
lammins.append([p,evals[-1]])
print (lammins)
plt.xlabel("p")
plt.plot(*zip(*lammins), '-x');
[[1, 640.3876764151261], [2, 3418.760725288617], [3, 8523.492250955445], [4, 16042.699861338706], [5, 28105.070223585415]]
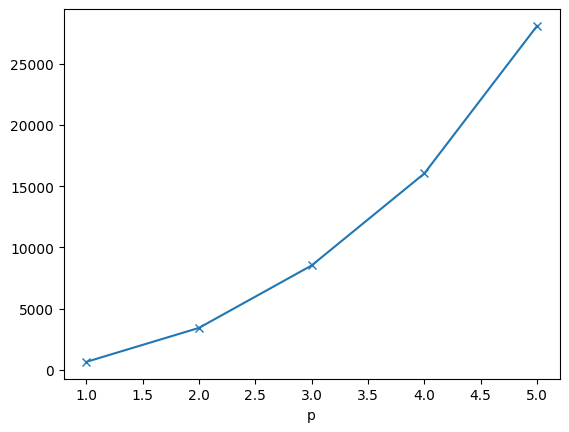
We clearly see that now the largest eigen-values grow as we refine the mesh, or increase the order. On every finite dimensional space the estimate \(\| \nabla u \|_{L_2} \leq c \| u \|_{L_2}\), but the constant grows with \(1/h\) and \(p\). This is called an inverse estimate.
18.2. Trace inequality#
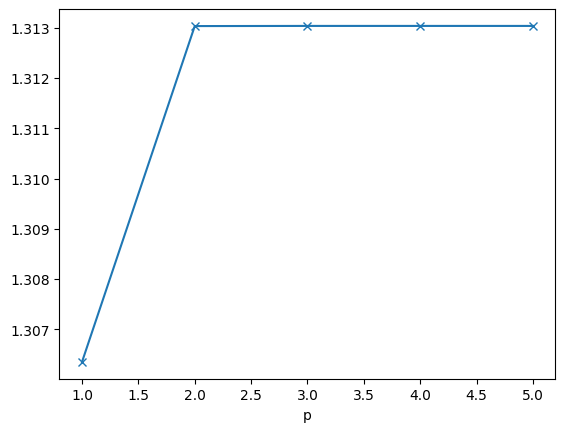
We have proven there exists a continuous trace operator \(\operatorname{tr} H^1(\Omega) \rightarrow L_2(\partial \Omega)\), its norm is
We verify this numerically:
def SetupTraceProblem(h,p):
mesh = Mesh(unit_square.GenerateMesh(maxh=h))
fes = H1(mesh, order=p)
u,v = fes.TnT()
H1Norm = BilinearForm(u*v*dx+grad(u)*grad(v)*dx).Assemble().mat
L2GammaNorm = BilinearForm(u*v*ds("left"), check_unused=False).Assemble().mat
pre = Projector(fes.FreeDofs(), range=True)
return L2GammaNorm, H1Norm, pre, fes
lams = []
for p in range(1,6):
A,B,P,fes = SetupTraceProblem(0.3, p)
evals,evecs = solvers.LOBPCG(A, B, pre=P, num=5, maxit=200, printrates=False, largest=True)
lams.append([p,evals[-1]])
print (lams)
plt.xlabel("p")
plt.plot(*zip(*lams), '-x');
[[1, 1.3063517613324944], [2, 1.31303231338216], [3, 1.313035279488765], [4, 1.3130352851582845], [5, 1.3130351305089458]]
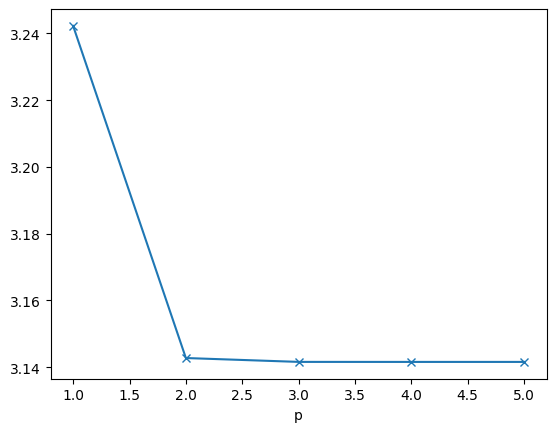
18.3. Poincaré inequality#
We are looking for the few lowest critical points / eigenvalues of
The smallest eigenvalue \(\lambda_1\) is 0, with the eigenspace being the constant functions. The second-smallest eigenvalue \(\lambda_2\) is the minimum of the Rayleigh quotient, taken the at the \(L_2\)-orthogonal complement to the first eigen-space, i.e. the constants. Thus we get
def SetupPoincareProblem(h,p):
mesh = Mesh(unit_square.GenerateMesh(maxh=h))
fes = H1(mesh, order=p)
u,v = fes.TnT()
H1SemiNorm = BilinearForm(grad(u)*grad(v)*dx).Assemble().mat
L2Norm = BilinearForm(u*v*dx).Assemble().mat
pre = Projector(fes.FreeDofs(), range=True)
return H1SemiNorm, L2Norm, pre, fes
lams = []
for p in range(1,6):
A,B,P,fes = SetupPoincareProblem(0.3, p)
evals,evecs = solvers.LOBPCG(A, B, pre=P, num=5, maxit=200, printrates=False, largest=False)
lams.append([p,sqrt(evals[1])])
print (lams)
plt.xlabel("p")
plt.plot(*zip(*lams), '-x');
[[1, 3.242236998989527], [2, 3.142757858998495], [3, 3.1416011435107007], [4, 3.141592752965741], [5, 3.1415939757786986]]
18.4. Korn’s inequality#
The symmetrized gradient differential operator on \([H^1(\Omega)]^d\)
plays an important role in solid mechanics. Korn’s first inequality states that, together with an \(L_2\)-norm, it provides an equivalent norm:
From Tartar’s theorem follows that the kernel of \(\varepsilon(.)\) is finite dimensional. If the kernel is blocked by essential boundary conditions, the semi-norm becomes a norm.
However, the norm equivalence may depend on the shape of the domain. We perform experiments on the rectangle \((0,L) \times (0,1)\), with Dirichlet boundary conditions at the left side.
def SetupKorn(h,p,L):
shape = Rectangle(L,1).Face()
shape.edges.Min(X).name="left"
mesh = Mesh(OCCGeometry(shape,dim=2).GenerateMesh(maxh=h))
fes = VectorH1(mesh, order=p, dirichlet="left")
u,v = fes.TnT()
EpsSemiNorm = BilinearForm(InnerProduct(Sym(Grad(u)),Sym(Grad(v)))*dx).Assemble().mat
H1SemiNorm = BilinearForm(InnerProduct(Grad(u),Grad(v))*dx).Assemble().mat
pre = H1SemiNorm.Inverse(freedofs=fes.FreeDofs(), inverse="sparsecholesky")
return EpsSemiNorm, H1SemiNorm, pre, fes
A,B,P,fes = SetupKorn(0.3,3,5)
evals,evecs = solvers.LOBPCG(A, B, pre=P, num=5, maxit=200, printrates=False)
print (evals[0])
gfu = GridFunction(fes)
gfu.vec.data = evecs[0]
Draw (gfu, deformation=True);
0.004064491563768896