19.2. Fluid-structure interaction with \(H(\mathrm{div})\)-conforming HDG#
In this section we use \(H(\mathrm{div})\)-conforming HDG elements for the Navier-Stokes equations and Lagrangian elements for the elastic wave equation, following [Neunteufel, Schöberl. Fluid-structure interaction with H(div)-conforming finite elements. Computers and Structures, (2021).]. The notation follows the FSI introduction: \(u_f,p_f\) denote the fluid velocity and pressure, \(d_s,u_s\) the solid displacement and velocity, and \(d_m,w_m\) the ALE mesh displacement and velocity.
19.2.3. Interface conditions#
For \(H(\mathrm{div})\)-conforming HDG, the fluid velocity has an element field \(u_T^f\) and a tangential facet field \(u_F^f\). The solid velocity \(u_s\) is represented by Lagrangian elements. We therefore enforce velocity continuity at the interface with Lagrange multipliers: one multiplier for the normal component and one for the tangential component. The mesh displacement is still represented by one global Lagrange space and satisfies \(d_m=d_s\) on the interface.
and these interface terms are evaluated on the deformed interface in the ALE setting.
19.2.4. Benchmark example#
We will consider the following benchmark proposed in [Turek, Hron. Proposal for numerical benchmarking of fluid-structure interaction between an elastic object and laminar incompressible flow. In: Fluid-Structure Interaction: Modelling, Simulation, Optimisation, 2006]. It is based on the classical flow around cylinder benchmark [Schäfer, Turek, Durst, Krause, Rannacher. Benchmark computations of laminar flow around a cylinder. In: Flow simulation with high-performance computers II, 1996], where additionally an elastic flag is “glued” behind the obstacle.
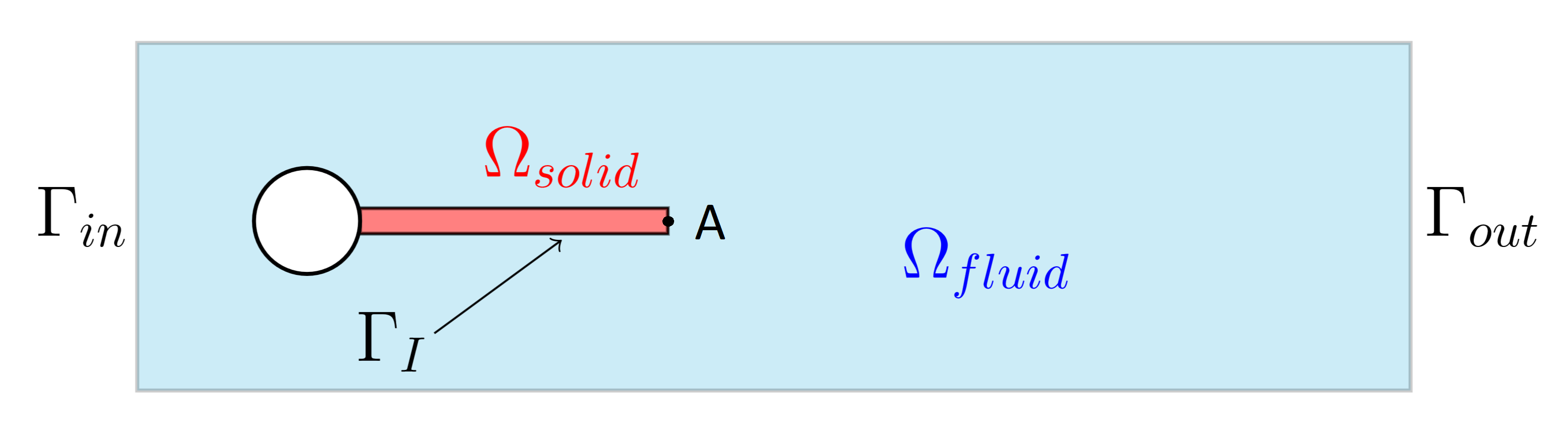
We choose the space-dependent function \(h(x)\) in the deformation extension problem to be large close to the elastic solid’s tip and to decrease with the distance.
from ngsolve import *
from netgen.occ import *
from ngsolve.webgui import Draw
import ipywidgets as widgets
tau = 0.004
tend = 2
order = 3
mesh_dirichlet = "wall|outlet|inlet|circ|circ_inner"
fluid_velocity_dirichlet = "wall|inlet|circ|circ_inner"
fluid_facet_dirichlet = "wall|inlet|circ|circ_inner|outlet"
solid_velocity_dirichlet = "circ|circ_inner"
multiplier_dirichlet = "wall|outlet|inlet|circ|circ_inner"
fixed_stokes_boundary = "wall|inlet|circ|interface|circ_inner"
# HDG stabilization parameter
alpha = Parameter(5)
# solid density, Poisson ratio, first Lamé parameter, fluid density,
# dynamic viscosity, and maximal inflow velocity
rho_s, poisson_s, mu_s, rho_f, nu_f, U = 1e4, 0.4, 0.5 * 1e6, 1e3, 1e-3, 1
# second Lamé parameter for solid
lambda_s = 2 * mu_s * poisson_s / (1 - 2 * poisson_s)
# inflow profile
u_inflow = CF((4 * U * 1.5 * y * (0.41 - y) / (0.41 * 0.41), 0))
def GenerateMesh(order, maxh=0.203):
circle = Circle((0.2, 0.2), r=0.05).Face()
circle.edges.name = "circ"
fluid = Rectangle(2.5, 0.41).Face()
fluid.faces.name = "fluid"
fluid.edges.Min(X).name = "inlet"
fluid.edges.Max(X).name = "outlet"
fluid.edges.Min(Y).name = "wall"
fluid.edges.Max(Y).name = "wall"
solid = (
MoveTo(0.248989794855664, 0.19).Rectangle(0.6 - 0.248989794855664, 0.02).Face()
)
solid.faces.name = "solid"
solid.edges.name = "interface"
domain_fluid = (fluid - circle) - solid
solid.edges["circ"].name = "circ_inner"
solid.edges.Min(X).name = "circ_inner"
domain = Glue([domain_fluid, solid])
mesh = Mesh(OCCGeometry(domain, dim=2).GenerateMesh(maxh=maxh))
mesh.Curve(order)
return mesh
mesh = GenerateMesh(order=order)
Draw(mesh);
For the spatial discretization we use an \(H(\mathrm{div})\) element field, a tangential facet field, and an \(L^2\) pressure for the fluid. The solid velocity and the mesh displacement are represented by \(H^1\)-conforming spaces. The Lagrange multiplier space lives on the interface and couples the HDG fluid velocity to the solid velocity.
V1 = VectorH1(mesh, order=order, dirichlet=mesh_dirichlet)
V2 = HDiv(
mesh,
order=order,
dirichlet=fluid_velocity_dirichlet,
definedon="fluid",
hodivfree=True,
)
V3 = TangentialFacetFESpace(
mesh, order=order, dirichlet=fluid_facet_dirichlet, definedon="fluid"
)
V4 = VectorH1(mesh, order=order, dirichlet=solid_velocity_dirichlet, definedon="solid")
Q = L2(mesh, order=0, definedon="fluid", lowest_order_wb=True)
# Lagrange multiplier forcing continuity of velocities across the interface
V5 = SurfaceL2(mesh, order=order, dirichlet=multiplier_dirichlet) ** 2
X = V2 * V3 * Q * V1 * V4 * V5
Y = V2 * V3 * Q
(u, uhat, p, d, v, f), (ut, uhatt, pt, dt, vt, ft) = X.TnT()
gf_solution = GridFunction(X)
gf_solution_old = GridFunction(X)
fluid_velocity, fluid_facet_velocity, pressure, mesh_deformation, solid_velocity, multiplier = gf_solution.components
fluid_velocity_old, fluid_facet_velocity_old, pressure_old, mesh_deformation_old, solid_velocity_old, multiplier_old = gf_solution_old.components
I = Id(mesh.dim)
F = Grad(d) + I
C = F.trans * F
Fold = Grad(mesh_deformation_old) + I
Cold = Fold.trans * Fold
n, h = specialcf.normal(2), specialcf.mesh_size
def tang(vec):
return vec - (vec * n) * n
def norma(vec):
return (vec * n) * n
def Stress(mat):
return mu_s * mat + lambda_s / 2 * Trace(mat) * I
For the time discretization we will use the Crank-Nicolson method
Only the pressure constraint is handled with implicit Euler.
# For Stokes problem
stokes = BilinearForm(Y, symmetric=True, check_unused=False)
stokes += (
nu_f * rho_f * InnerProduct(2 * Sym(Grad(u)), Sym(Grad(ut)))
- div(u) * pt
- div(ut) * p
- 1e-8 * p * pt
) * dx("fluid")
stokes += (
nu_f
* rho_f
* (
InnerProduct(2 * Sym(Grad(u)) * n, tang(uhatt - ut))
+ InnerProduct(2 * Sym(Grad(ut)) * n, tang(uhat - u))
+ alpha * order * order / h * InnerProduct(tang(uhatt - ut), tang(uhat - u))
)
) * dx("fluid", element_boundary=True)
stokes.Assemble()
compile_integrands = False
######################################### SOLID #############################################
bfa = BilinearForm(X, symmetric=False, check_unused=False, condense=True)
bfa += (
(1 / tau * (d - mesh_deformation_old) - 0.5 * (v + solid_velocity_old)) * dt
+ rho_s / tau * (v - solid_velocity_old) * vt
+ 2 * InnerProduct(F * Stress(0.5 * (0.5 * (C + Cold) - I)), Grad(vt))
).Compile(compile_integrands, wait=True) * dx("solid")
def minCF(a, b):
return IfPos(a - b, b, a)
gf_dist = GridFunction(H1(mesh, order=2))
gf_dist.Set(minCF((x - 0.6) ** 2 + (y - 0.19) ** 2, (x - 0.6) ** 2 + (y - 0.21) ** 2))
def NeoHookExt(C, mu=1, lam=1):
return 0.5 * mu * (Trace(C - I) + 2 * mu / lam * Det(C) ** (-lam / 2 / mu) - 1)
bfa += Variation(
1e-20 * mu_s / sqrt(gf_dist * gf_dist + 1e-12) * NeoHookExt(C) * dx("fluid")
).Compile(compile_integrands, wait=True)
################################# FLUID ##############################################
grad_mesh_velocity = (Grad(d) - Grad(mesh_deformation_old)) / tau
mesh_velocity = (d - mesh_deformation_old) / tau
relative_velocity = u - mesh_velocity
relative_normal_velocity = relative_velocity * n
upwind = (u * n) * n + IfPos(relative_normal_velocity, tang(u), tang(uhat))
cfinner = (
nu_f * rho_f * InnerProduct(Sym(Grad(u)) + Sym(Grad(fluid_velocity_old)), Sym(Grad(ut)))
- div(u) * pt
- div(ut) * p
- rho_f * InnerProduct(0.5 * (u + fluid_velocity_old), Grad(ut) * relative_velocity)
+ rho_f * InnerProduct(0.5 * grad_mesh_velocity * (u + fluid_velocity_old), ut)
+ rho_f / tau * (u - fluid_velocity_old) * ut
)
facet_jump_midpoint = 0.5 * tang(uhat - u + fluid_facet_velocity_old - fluid_velocity_old)
cfouter = nu_f * rho_f * (
InnerProduct(Sym(Grad(u) + Grad(fluid_velocity_old)) * n, tang(uhatt - ut))
+ InnerProduct(2 * Sym(Grad(ut)) * n, facet_jump_midpoint)
+ alpha
* order
* order
/ h
* InnerProduct(tang(uhatt - ut), facet_jump_midpoint)
) + rho_f * (
relative_normal_velocity * upwind * ut
+ IfPos(relative_normal_velocity, 1, 0) * relative_normal_velocity * facet_jump_midpoint * uhatt
)
bfa += cfinner.Compile(compile_integrands, wait=True) * dx("fluid", deformation=mesh_deformation)
bfa += cfouter.Compile(compile_integrands, wait=True) * dx(
"fluid", element_boundary=True, deformation=mesh_deformation
)
# interface
bfa += (
(norma(v - u.Trace()) + tang(v - uhat.Trace())) * ft
+ (norma(vt - ut.Trace()) + tang(vt - uhatt.Trace())) * f
).Compile(compile_integrands, wait=True) * ds("interface", deformation=mesh_deformation)
proxy not matching space, checking if it is working anyway
To increase the inflow velocity depending on time, we have to extend the new velocity into the domain before solving the system. This can be done by solving a Stokes problem with the new velocity as Dirichlet data only on the fluid domain. To tell the solver on which domain it should work, we have to define the corresponding degrees of freedom, which is done in terms of bitarrays.
bt_stokes = Y.FreeDofs() & ~Y.GetDofs(mesh.Materials("solid"))
bt_stokes &= ~Y.GetDofs(mesh.Boundaries(fixed_stokes_boundary))
inv_stokes = stokes.mat.Inverse(bt_stokes, inverse="")
gf_stokes = GridFunction(Y)
stokes_velocity, stokes_facet_velocity, stokes_pressure = gf_stokes.components
res_stokes = gf_stokes.vec.CreateVector()
stokes_velocity.Set(u_inflow, BND, definedon=mesh.Boundaries("inlet"))
res_stokes.data = stokes.mat * gf_stokes.vec
gf_stokes.vec.data -= inv_stokes * res_stokes
fluid_velocity.vec.data = stokes_velocity.vec
fluid_facet_velocity.vec.data = stokes_facet_velocity.vec
pressure.vec.data = stokes_pressure.vec
scene_u = Draw(
fluid_velocity,
mesh.Materials("fluid"),
"velocity",
deformation=mesh_deformation,
order=3,
max=2,
)
scene_p = Draw(pressure, mesh.Materials("fluid"), "pressure", deformation=mesh_deformation)
scene_d = Draw(mesh_deformation, mesh, "deformation")
gf_history = GridFunction(X, multidim=0)
w = gf_solution.vec.CreateVector()
res = gf_solution.vec.CreateVector()
Time loop.
# Calculate quantities of interest
def CalcForces(disp_x, disp_y):
dmidx, dmidy = mesh_deformation(0.6, 0.2)
disp_x.append(dmidx)
disp_y.append(dmidy)
return
disp_x = [0]
disp_y = [0]
times = [0]
t = 0
i = 0
tw = widgets.Text(value="t = 0")
display(tw)
with TaskManager():
while t < tend - tau / 2.0:
t += tau
gf_solution_old.vec.data = gf_solution.vec
# Newton
for step in range(2):
bfa.AssembleLinearization(gf_solution.vec)
inv = bfa.mat.Inverse(bfa.space.FreeDofs(bfa.condense), inverse="")
bfa.Apply(gf_solution.vec, res)
if bfa.condense:
res.data += bfa.harmonic_extension_trans * res
w.data = inv * res
if bfa.condense:
w.data += bfa.harmonic_extension * w
w.data += bfa.inner_solve * res
gf_solution.vec.data -= w
if i % 4 == 0:
scene_u.Redraw()
scene_p.Redraw()
scene_d.Redraw()
if i % 20 == 0:
gf_history.AddMultiDimComponent(gf_solution.vec)
times.append(t)
CalcForces(disp_x, disp_y)
i += 1
tw.value = f"t = {round(t,5)}"
Draw(
gf_history.components[0],
mesh.Materials("fluid"),
animate=True,
min=0,
max=2,
autoscale=True,
deformation=gf_history.components[3],
order=3,
);
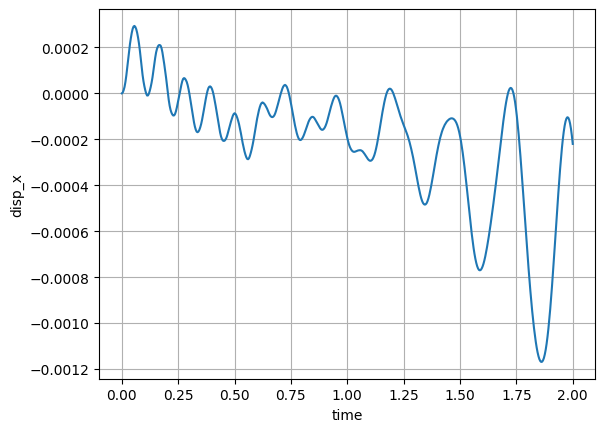
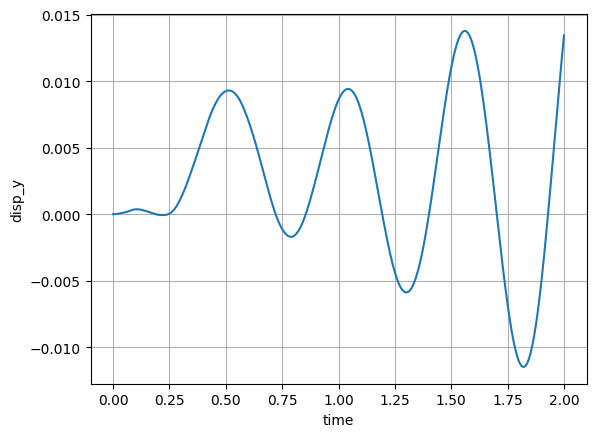
Draw results over time. They become periodic after some time.
import matplotlib.pyplot as plt
plt.plot(times, disp_x)
plt.xlabel("time")
plt.ylabel("disp_x")
plt.grid(True)
plt.show()
plt.plot(times, disp_y)
plt.xlabel("time")
plt.ylabel("disp_y")
plt.grid(True)
plt.show()