12.6. Heavy top without kinematik constraints#
example from
Evaluation and implementation of Lie group integration methods for rigid multibody systems
S. Holzinger, M. Arnold, J. Gerstmayr
Section 4.1
https://link.springer.com/article/10.1007/s11044-024-09970-8
import ngsolve
from ngsolve import *
from netgen.occ import *
import ipywidgets as widgets
from ngsolve.comp import GlobalSpace
from ngsolve.webgui import Draw
from ngsolve.solvers import Newton
from ngsolve.comp import DifferentialSymbol
# ngsglobals.msg_level=10
mass = 15
Jxx = Jzz = 0.234375
Jyy = 0.468750 # (= 2*Jxx, so its a disk)
omega0 = CF( (0,150,-4.61538) )
b = sqrt(3/2 * Jyy/mass)
rho = mass/(4*b*b) # kg/ m**2
b, rho
(0.21650635094610965, 80.00000000000001)
center = Pnt( (0,1,0) )
disk = WorkPlane(Axes((0,1,0), Y)).RectangleC(2*b, 2*b).Face()
shape = Glue ([disk, Segment( (0,0,0), (0,1,0)) ])
shape.vertices.Min(Y).name="A"
mesh = Mesh(OCCGeometry(shape).GenerateMesh(maxh=3))
Draw (mesh);
RBshapes = CF ( ( 1, 0, 0,
0, 1, 0,
0, 0, 1,
y, -x, 0,
0, z, -y,
-z, 0, x) ).Reshape((6,3)).Compile() # realcompile=True, wait=True)
RBspace = GlobalSpace (mesh, order=1, basis = RBshapes)
SYMshapes = CF ( ( 1, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 1, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 1,
0, 1, 0, 1, 0, 0, 0, 0, 0,
0, 0, 1, 0, 0, 0, 1, 0, 0,
0, 0, 0, 0, 0, 1, 0, 1, 0) ).Reshape((6,9)).Compile() # realcompile=True, wait=True)
SYMspace = GlobalSpace (mesh, order=1, basis = SYMshapes)
P1shapes = CF ( ( 1, 0, 0,
0, 1, 0,
0, 0, 1,
x, 0, 0,
0, x, 0,
0, 0, x,
y, 0, 0,
0, y, 0,
0, 0, y,
z, 0, 0,
0, z, 0,
0, 0, z)).Reshape((12,3)).Compile() # realcompile=True, wait=True)
P1space = GlobalSpace (mesh, order=1, basis = P1shapes)
P1space.AddOperator("dx", VOL, P1shapes.Diff(x))
P1space.AddOperator("dy", VOL, P1shapes.Diff(y))
P1space.AddOperator("dz", VOL, P1shapes.Diff(z))
def MyGrad(gf):
return CF( (gf.Operator("dx"), gf.Operator("dy"), gf.Operator("dz") )).Reshape((3,3)).trans
def MyGradB(gf):
return CF( (gf.Operator("dx", BND), gf.Operator("dy", BND), gf.Operator("dz", BND))).Reshape((3,3)).trans
def MyGradBB(gf):
return CF( (gf.Operator("dx", BBBND), gf.Operator("dy", BBBND), gf.Operator("dz", BBBND))).Reshape((3,3)).trans
12.6.1. Livens principle#
[P. Kinon, B. Betsch 23]
with position \(q : [0,T] \rightarrow M\), velocity \(v : [0,T] \rightarrow T_q M\), momentum \(p : [0,T] \rightarrow T^\ast_q M\)
12.6.2. time-stepping#
Rattle algorithm (see Hairer-Lubich-Wanner, page 246)
Variables are
position \(q = a + B x\), an affine linear function, with constraint \(B^T B = I\), i.e. \(B\) is orthogonal (and thus, by continuity, a rotation matrix)
velocity \(v = a + b \wedge x\), in body-frame
momentum \(p = \rho v\)
unknowns in time-step: \(q(t_{n+1}), v(t_{n+1/2}), p(t_{n+1/2}), \hat p := p(t_{n+1}) \)
constraints: \(A(t_{n+1}) = \dot A(t_{n+1}) = (0,0,0)\)
Lagrange parameters: \(f_A(t_n), f_A(t_{n+1})\)
Thesis Linus Knoll
fesR = NumberSpace(mesh)
fes = P1space * RBspace * RBspace * RBspace * fesR**3 * fesR**3
festest = RBspace * RBspace * RBspace * RBspace * SYMspace * fesR**3 * fesR**3
# print ("dimtrial =", fes.ndof, ", dimtest =", festest.ndof)
gfold = GridFunction(fes)
gf = GridFunction(fes)
qold, vold, pold, phatold, fa1old, fa2old = gfold.components
gfq, gfv, gfp, gfphat, gffa1, gffa2 = gf.components
q, v, p, phat, fa1, fa2 = fes.TrialFunction()
dv, dp, du1, du2, dlagsym, da, daprime = festest.TestFunction()
dvert = DifferentialSymbol(BBBND)
tau = 0.0005
P0 = CF( (0, 0, 0) )
PA0 = CF( (0, 1, 0))
gfphat.Set ( rho*Cross (omega0, CF((x,y,z))) , definedon=mesh.Boundaries(".*") )
force = CF( (0,0,-9.81*rho) )
dpointA = da
dpointAprime = daprime
qold.Set ( (x, y, z) )
Rnew = MyGrad(q)
Rold = MyGradB(qold)
Rmean = 0.5*(Rold+Rnew)
a = BilinearForm(trialspace=fes, testspace=festest)
# linear part of q is orthogonal:
a += InnerProduct (Rnew.trans*Rnew-Id(3), dlagsym) * ds
# p = rho*v
a += (rho*v-p)*dv * ds
# dot q = v
# a += (Rmean.trans * (q - qold) - tau*v) * dp * ds
# a += ( 1/2*(qold-q + tau * Rold*v)*(Rold*dp) + 1/2*(qold-q+tau*Rnew*v) * (Rnew*dp) ) * ds
a += (qold + tau/2 * Rold*v - (q-tau/2*Rnew*v) ) * (Rmean*dp) * ds # most accurate
# dot p = f
a += ((Rnew*phat-Rmean*p) - tau/2*force) * (Rnew*du1) * ds
a += ((Rmean*p-Rold*phatold) - tau/2*force) * (Rold*du2) * ds
# forces from Lagrange parameters, in t_n and t_{n+t}:
a += ( (- tau/2*fa1 ) * (Rnew*du1)) *dvert("A")
a += ( (- tau/2*fa2 ) * (MyGradBB(qold)*du2)) *dvert("A")
# constraints and velocity constraints:
a += (q-P0)*dpointA* dvert("A")
a += (phat)*dpointAprime * dvert("A")
# tricky to set initial conditions, since mass matrix alone is singular
# gfq.Set ( (x, y, z), definedon=mesh.Boundaries(".*") )
qs,dqs = P1space.TnT()
bfset = BilinearForm(qs*dqs*ds + qs.Operator("dy")*dqs.Operator("dy")*ds).Assemble()
lfset = LinearForm(CF((x,y,z))*dqs*ds + CF((0,1,0))*dqs.Operator("dy")*ds).Assemble()
gfq.vec[:] = bfset.mat.Inverse()*lfset.vec
scene = Draw (gf.components[1], mesh, deformation=(gf.components[0]-CF((x,y,z))), center=(0,0,0), radius=1.2)
tw = widgets.Text(value='t = 0')
display(tw)
t = 0
tt = []
Epott = []
Ekint = []
Et = []
axt, ayt, azt = [], [], []
# with TaskManager(): # pajetrace=10**9):
while t < 1-1e-10:
gfold.vec[:] = gf.vec
Newton(a=a, u=gf, printing=False, maxerr=1e-8)
scene.Redraw()
t += tau
tw.value = "t = {t:.2f}".format(t=t)
Epot = -Integrate (gfq*force*ds, mesh)
Ekin = Integrate (rho/2*gfv*gfv*ds, mesh)
tt.append(t)
Epott.append(Epot)
Ekint.append(Ekin)
axt.append (Integrate(gfq[0]*ds, mesh)/(4*b**2))
ayt.append (Integrate(gfq[1]*ds, mesh)/(4*b**2))
azt.append (Integrate(gfq[2]*ds, mesh)/(4*b**2))
Et.append(Epot+Ekin)
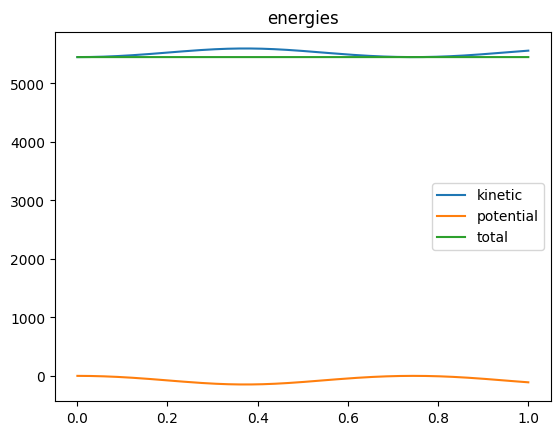
import matplotlib.pyplot as plt
plt.plot (tt, Ekint, label="kinetic")
plt.plot (tt, Epott, label="potential")
plt.plot (tt, Et, label="total")
plt.legend()
plt.title("energies")
plt.show()
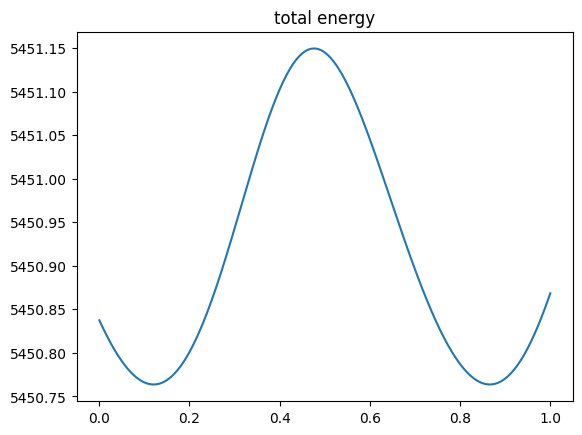
plt.plot (tt, Et)
plt.title("total energy")
plt.show()
plt.plot (tt, axt, label="x")
plt.plot (tt, ayt, label="y")
plt.plot (tt, azt, label="z")
plt.legend()
plt.show()
print (axt[-1], ayt[-1], azt[-1])
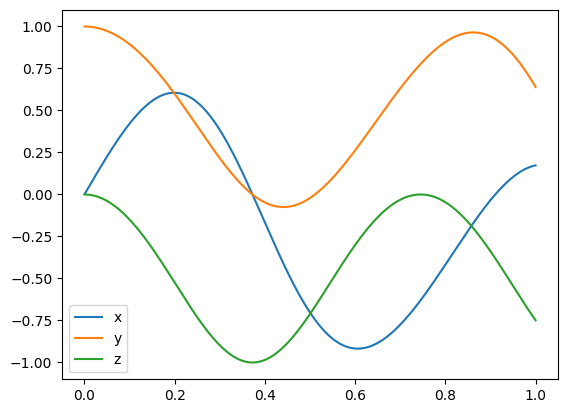
0.1733820676277703 0.639920677477894 -0.7486255306635918
Values at \(t=1\):
\(\tau\) |
\(A_x\) |
\(A_y\) |
\(A_z\) |
|---|---|---|---|
4e-3 |
-0.08166 |
-0.09591 |
-0.99203 |
2e-3 |
0.18651 |
0.53720 |
-0.82258 |
1e-3 |
0.17802 |
0.61715 |
-0.76642 |
5e-4 |
0.17458 |
0.63451 |
-0.75294 |
2.5e-4 |
0.17366 |
0.63870 |
-0.74960 |
with improved velocity integration:
\(\tau\) |
\(A_x\) |
\(A_y\) |
\(A_z\) |
|---|---|---|---|
4e-3 |
0.17592 |
0.62806 |
-0.75802 |
2e-3 |
0.17396 |
0.63734 |
-0.75069 |
1e-3 |
0.173497 |
0.639414 |
-0.749032 |
5e-4 |
0.173382 |
0.639921 |
-0.748626 |
2.5e-4 |
0.173353 |
0.640047 |
-0.748524 |